

搜索
取消
清空記錄
歷史記錄
清空記錄
歷史記錄
光纖羅經的工作原理
光纖陀螺本質上作為一個角速率傳感器,主要由光源、Y波導、探測器、耦合器、保偏光纖等幾部分組成。其工作原理遵從于薩格納克效應公式,定量關系如上式所示,式中Φ表示激光干涉的相位,L為光纖的長度,R為光纖環的半徑,λ為激光的波長,C為光速,Ω為光纖環的轉速。
2023-11-21 13:11:10哈爾濱航士科技發展有限公司5270
4.1 光纖陀螺工作原理
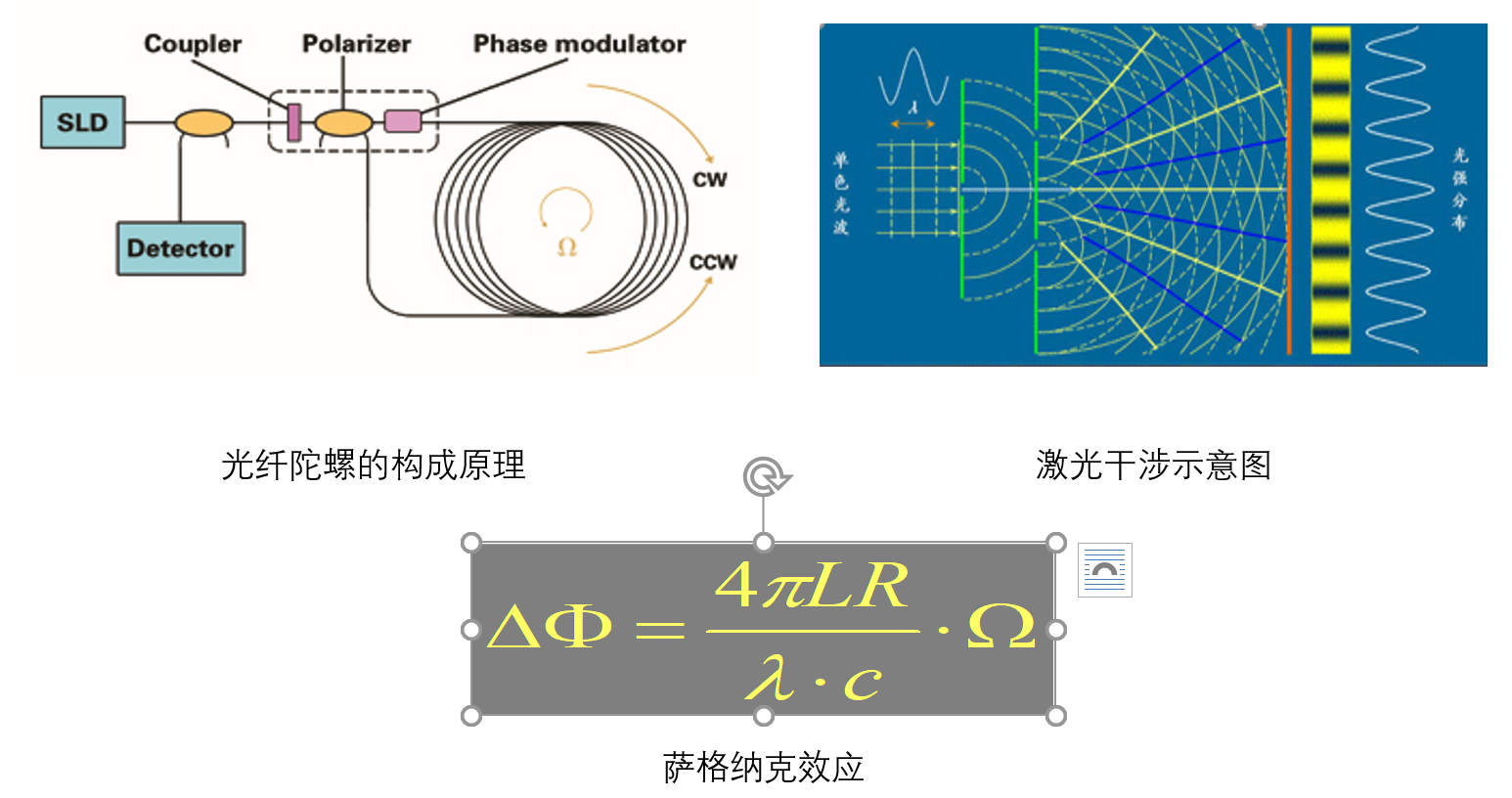
光纖陀螺本質上作為一個角速率傳感器,主要由光源、Y波導、探測器、耦合器、保偏光纖等幾部分組成。其工作原理遵從于薩格納克效應公式,定量關系如上式所示,式中Φ表示激光干涉的相位,L為光纖的長度,R為光纖環的半徑,λ為激光的波長,C為光速,Ω為光纖環的轉速。薩格納克效應表明,光纖環轉動的角速度與激光在光纖環內發生干涉的相位差成正比。這開辟了利用沒有運動部件構成的利用光學原理測量運動角速率的新紀元。
4.2光纖陀螺羅經系統的硬件構成
每臺光纖羅經由三個相互垂直安裝的光纖陀螺和三個加速度計和相應的電路板和計算機構成。
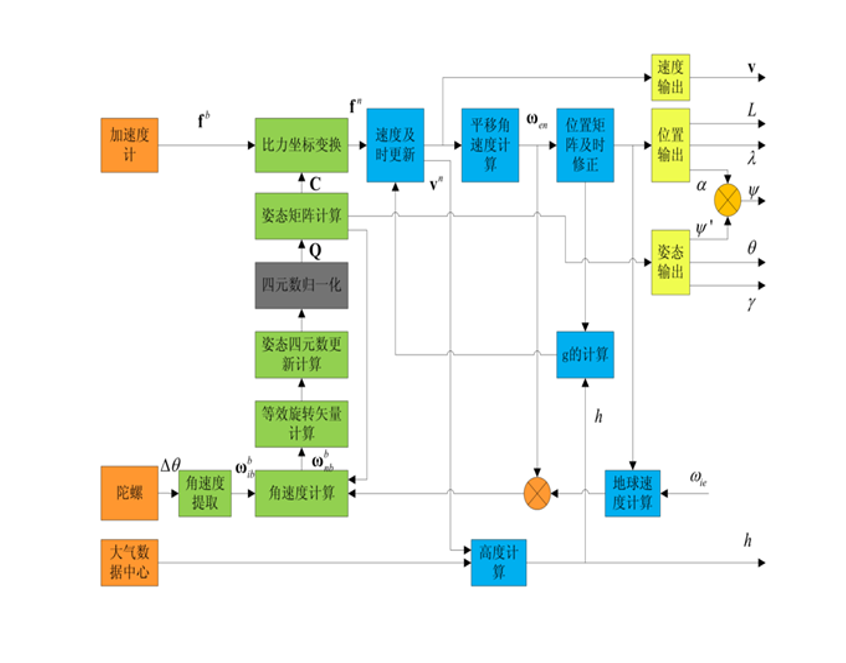
計算機通過對加速度計輸出的比力和陀螺輸出的角速率信息進行采集與補償后,根據慣性坐標系下的光纖陀螺羅經數學模型完成載體航向、縱搖、橫搖等信息的解算,其算法編排如下圖所示。角速度輸入的圓錐補償模塊利用光纖陀螺采集角速度信號計算旋轉矢量,完成四元數的更新,從而完成矩陣的更新。通過加速度計輸出比力的坐標轉換與濾波獲得姿態矩陣以及相應的航向和姿態角信息。
光纖羅經可以在海面動態環境下,計算出載體的航向、姿態、速度甚至位置等信息,而且沒有運動部件,與傳統機械陀螺構成的電羅經相比,不僅壽命長,不需要定期更換陀螺,而且精度更高,輸出的參數也更多。

 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~RELATED PROGRAMS
相關方案
聯系我們
 滬公網安備 31011502007089號
滬公網安備 31011502007089號版權所有 ? 哈爾濱航士科技發展有限公司
黑ICP備18004167號-1
選擇區號